### Izgradnja
Pre gradnje sam proučio YouTube literaturu. Jedna od najvažnijih stvari je lepljenje ručice na elevonima. Mnogi se žale da te ručice nisu dovoljno jake i da su zato olivadili model. Odličan video kako i šta je napravio Andrew Newton. Za razliku od njega ja sam koristio plastične poklopce kutija od šrafčića. Pošto je površina elevona zakrivljena morao sam da to stavim u stegu preko noći (onaj moj lepak sporo radi). Preporučujem odgledati ceo video, ali posebno momenat oko 3:00.
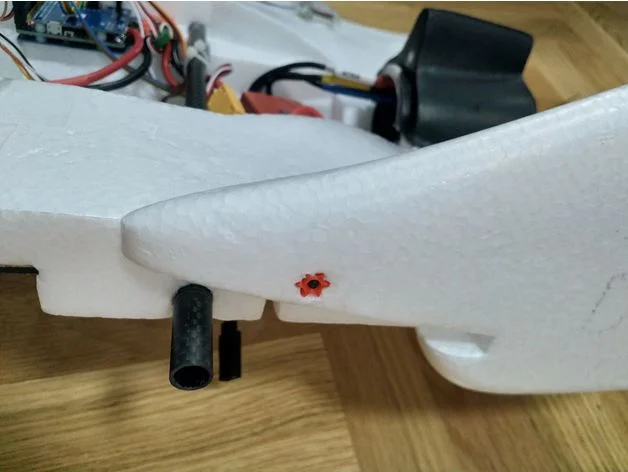
Za razliku od njega ja nisam zalepio vertikalne stabilizatore plašeći se da će mi to smetati pri pakovanju i transportu modela. Zato sam dodao karbonsku šipku u trup, a u stabilizatore 3D štampani dodatak. Evo slike:

Držač motora nije preterano jak. Ja sam mislio da je OK iako mnogi odmah ubacuju aluminijumski ili odštampan na 3D štampaču. U svakom slučaju to sad pre svega zavisi od motora i propelera koji ćete montirati. Maksimalan prečnik (uvek staviti najveći prečnik zbog efikasnosti) je 10". Takođe razmak od trupa do napadne ivice propelera treba da bude bar 20mm. Sve ispod toga će stvarati vibracije i buku. Ja sam stavio ovaj produžetak od 25 mm:
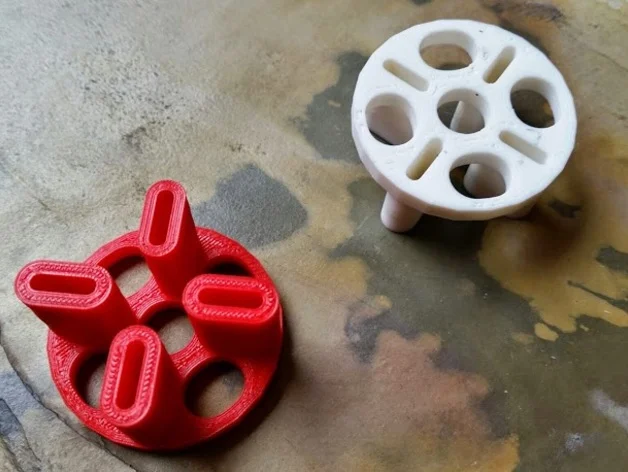
Šta se meni desilo? Prvo sam hteo da letim sa fiksnim propelerom. Tokom testa jedrenja propeler je na sletanju zakačio zemlju i polomim osovinu motora. Da nije pukla ona pukao bi nosač motora… Kako rešiti? Sklopivi propeler! Ali ne lezi vraže! i oni su problematični! bez odgovarajućih spinera ili adaptera jedan krak može doći na suprotnu stranu. To dovede do nebalansiranog rasporeda mase i puče sve! Sile koje centrifuga pravi su neverovatne! Ode nosač, pokida žice, počupa konektore… Pogledajte šta na ovo kaže Painless, a ispod je moje rešenje:
### Servo motori elevona
I ja koristim "hot glue" kao što je pokazao Andrew Newton u svom videu o izgradnji. Za razliku od Newtona ja pri lepljenju koristim tehniku sličnu lemljenju dve žice. Prvo nanesem - razmažem lepak na obe površine (servo i ležište) u što tanjem sloju tako da se i podloga dobro zagreje i lepak "okvasi" podlogu maksimalno. Onda stavim dobru kap u ležište i pritisnem i poravnam servo odozgo. Ovaj lepak dovoljno dobro drži a opet ga je moguće razlepiti bez veće štete na EPO peni. Ukoliko mehaničko kidanje ne pomogne sipati alkohol, sačekati minut dva i "hot glue" postane mekan.
U prvi mah sam kupio jeftine servoe
https://www.banggood.com/4PCS-Racerstar-MG90S-9g-Micro-Metal-Gear-Analog-Servo-For-450-RC-Helicopter-RC-Car-Boat-Robot-p-1516604.html
Grozni su! Crkavaju sami od sebe. Jedan mi je crkao odmah, drugi nakon par okreta, ali tek kad sam uključio ponovo… Oni imaju metalne zupčanike, ali jedan od ključnih delova je plastični te mi je jedan otišao i usled većeg opterećenja. Izgledaju jaki i dobri, ali su najbolji za izbegavati…
Onda sam odrešio kesu i uzeo dva Spektrum A3020. Jako su precizni. Za sada rade.
### Flight controller (FC)
Pored mnoštva opcija nekako je isplivalo da za krilo treba ići na INAV, a onda su se tu pojavili MATEK kontroleri gde je jedan od najnovijih [MATEK F765-WING](http://www.mateksys.com/?portfolio=f765-wing) nekako izgledao nao dobar izbor. Iz ove perspektive mogao sam da uzmem i neki manji no ko zna, možda će mi poslužiti i za neki budući projekat. To čudo može da primi 132 A iz baterije i preda ih na dva motora. Plus gomila UART portova izlaza za servo, posebno napajanje za VTX, kameru, prijemnik, GPS... Malo je ružno što moraju da se leme one tri žice između gornje ploče gde su stabilizatori napona i donje ploče, ali sem toga prosto radi kako je programiran.
Svaki FC treba montirati u težište. Moj je nešto pomeren, no to kod većine krilatih letelica nije preterano kritično jer su rotacije relativno spore (da ne ulazim u fiziku dosta o ovome).
### INAV
Instalirao 2.6.0, a zatim upgrade na 2.6.1. Ne vidim neku razliku nisam dovoljno testirao ni jednu ni drugu verziju.
(nastaviće se)
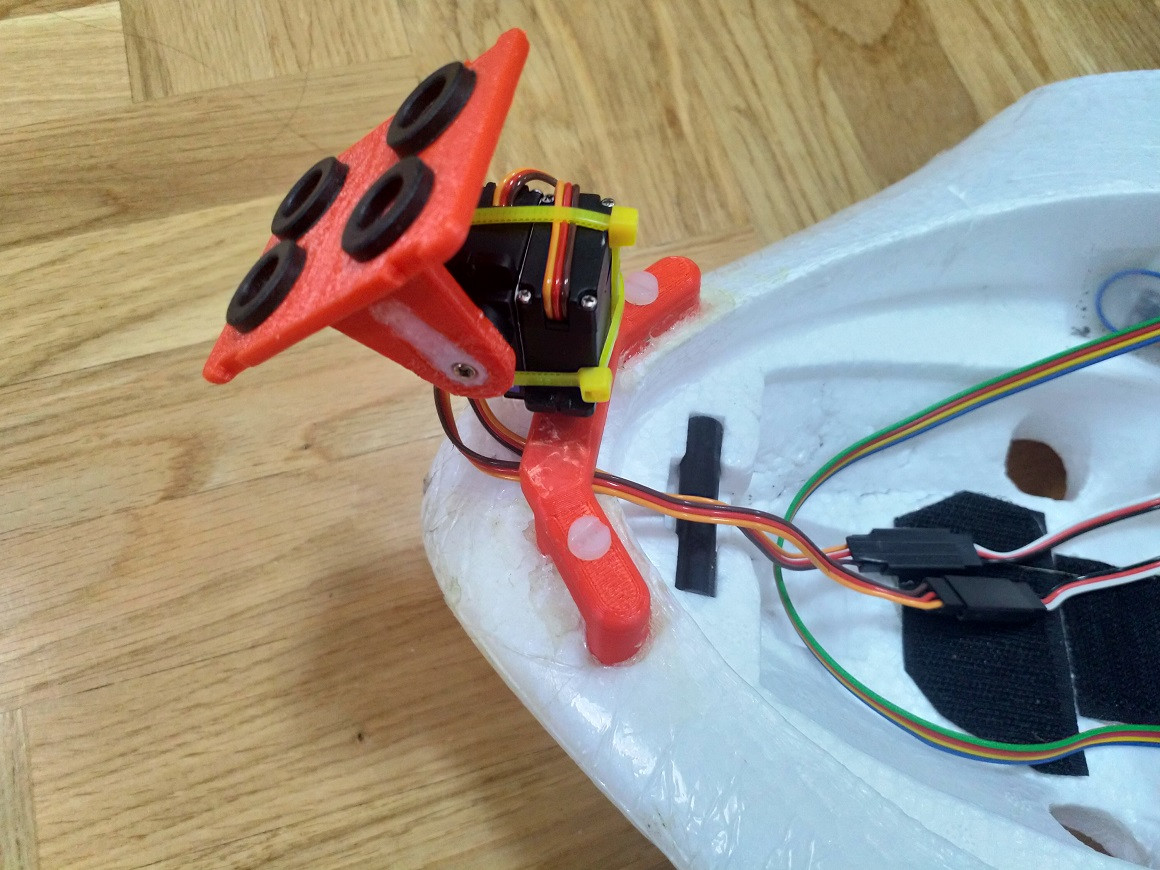
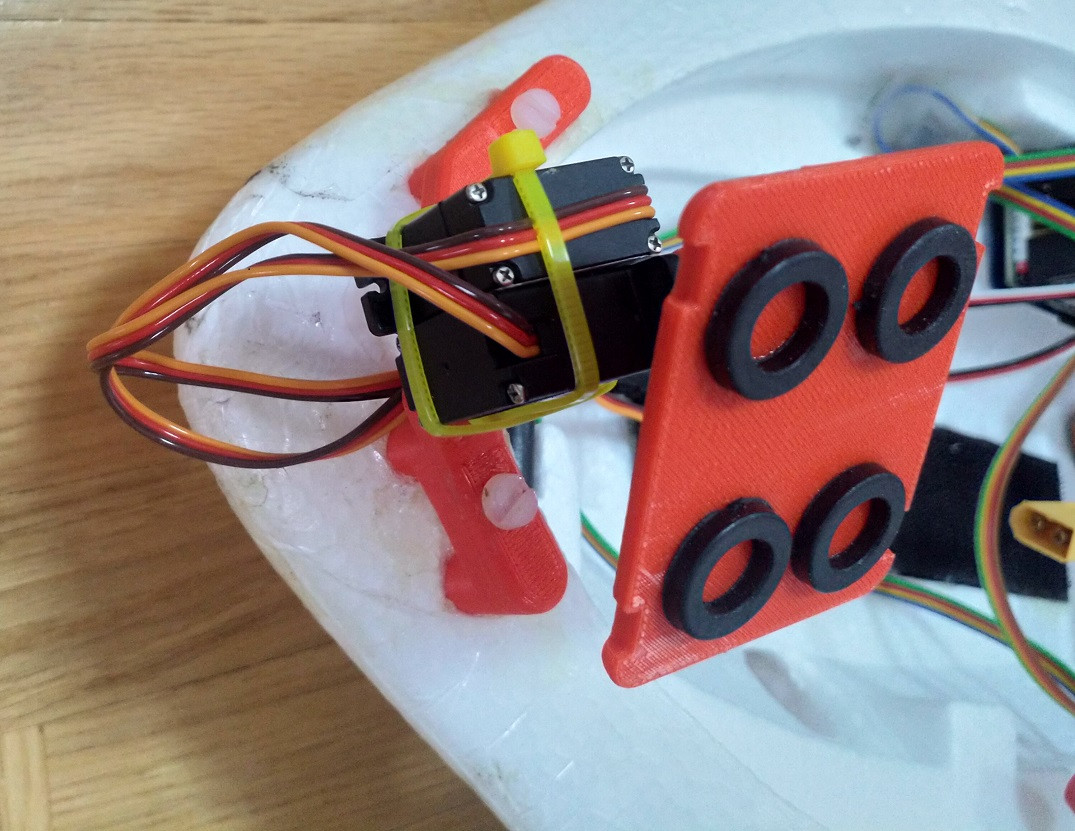
Servo motori koje sam koristio za pan-tilt su tresli kameru pa sam ih zamenio sa:
Ovo su motori sa više od 180 stepeni rotacije, takođe nisu brzi što omogućava pristojnije okretanje i manje cimanja te stabilniju sliku. I jači su od prethodnih pa je cela konstrukcija stabilnija.
Kako rade novi motori može se videti na početku i tokom videa, prvi put od 43 sekunde:
Evo kako to izgleda:
Link na STL fajlove:
Ta dva servoa se drže pomoću dvostrukolepljive trake između i ovih žutih plastičnih vezica za kablove. One crne gumice za slavinu su zalepljene superlepkom i tu su zbog trenja. Da, kameru samo drži trenje da ne izleti... Svete plastične vezice treba povremeno menjati. Sunce ih "omekšava" pa puknu.
Kako mi je cilj dosta veliki domet, a par puta sam primio opomenu da mi je RC prijem loš na FrSky X8R 2.4G 16CH prijemniku odlučio sam se za upgrade. I dalje mislim da je X8R jako dobar prijemnik, jer tu je ipak 16 CH sa izvrsnom telemetrijom. I vrlo lepo radi sa TX16S… Problemi koje sam imao su se javljali na udaljenostima preko 1 km i iza neke prepreke. Zato sam pazario
Šta sam dobio, a šta sam izgubio?
Crossfire ima mnogo veći domet i radnu frekvenciju koja je daleko manje osetljiva na prepreke 868 MHz vs 2.4 GHz.
Prijemnik je sitan mali i lagan. TBS softver se vrlo lako konfiguriše i update-uje.
X8R šalje više podataka kroz telemetriju, 16 CH (Crossfire 12), ne treba vam dodatni modul za TX16S, antene na prijemniku su manje i ima ih dve pa ako su postavljene jedna u odnosu na drugu pod 90 stepeni teško je naći ugao sa lošim prijemom (Crossfire ima dipolnu antenu i ako je antena poravnata sa pravcem u kome se nalazi predajnik prijem može biti loš). Morao sam da bušim trup kako bih dugačku Crossfire antenu postavio u optimalan položaj. Kako to izgleda se može videti na [prethodnom videu od 43-će sekunde](https://www.youtube.com/watch?v=0GMzmXnD2mQ)... Antenu sam postavio vertikalno jer su tada slepe tačke ispod i iza modela, a u krug po horizontali prijem je najbolji.
Najveći problem može biti gubitak od 4 kanala. U mom slučaju to nije kritično, koristim 3 CH za upravljanje, 2 CH za pan-tilt i još nekoliko kanala za FC. Ukupno oko 10 CH. Ali da se radi o letelici koja ima još elerone, flapsove i točkiće na izvlačenje došli bismo do toga da je 12 CH prilično kratko...
Instalirao INAV 4.0 na FC. Radi i nije bilo problema kao sa INAV 3… Većinu podešavanja sam uspeo da prekopiram, no verzije 2, 3 i 4 su prilično nekompatibilne - pažnja.
Stigli smo i do INAV 6.1.0. Nije bilo previše problema za upgrade.
U međuvremenu se pojavio DJI O3 air unit. Izgledalo je da kvalitet snimka može da se poredi sa GoPro, što u nekim slučajevima jeste tačno. Uzeo sam DJI goggles V2 i na krilo umesto RunCam 2 4k postavio O3 kamericu. Prvi utisci su dobri. Sistem je lakši i aerodimamičniji. Kvalitet snimka porediv i verovatno bolji nego sa RunCam 2 4k. Međutim FPV slika je generalno puno bolja nego analofni signal. Uradio sam test do 8 km i zadovoljan sam.
Evo kako to izgleda nakon montaže:
Pošto se O3 jako brzo pregreva dodao sam prekidač kojim mogu da ga ugasim dok GPS traži satelite i dok zatežem praćku.
Ovde je snimak sa najvećim smetnjama na 8+km, mislim da je u tom zaokretu baterija zaklonila antenicu.
Ovo je ceo let, videoje snimljen na 2.7k, provučen kroz GyroFlow 1.5 (kamerica ima gyro i podaci su snimljeni u video fajl) i okačena na youtube



")